《时空信息学报》是由自然资源部主管,国家基础地理信息中心、中国地理信息产业协会、黑龙江测绘地理信息局共同主办的中文学术期刊,双月刊。为分享最新研究成果,搭建学术交流平台,中国地理信息产业协会公众号开设“时空信息学报”专栏,独家刊载《时空信息学报》论文,供广大读者研阅。1月2日起,陆续刊发2024年第5期的10篇论文。欢迎产学研用各界关注、分享!
两步法折光改正模型在测量机器人边坡监测中的应用
桑兴旭1,肖维1,杨松林1,肖岚2
1. 湖南五凌电力科技有限公司,长沙 410004;2. 赣州市不动产登记中心,赣州 341000
摘 要:大气折光是影响测量机器人边坡监测精度的重要因素。测量机器人边坡监测中折光改正模型存在易引起气象代表性误差及未考虑点位空间位置关系的问题,因此,本文提出一种包括距离改正及坐标改正的两步法折光改正模型。在利用气象改正公式对距离观测值进行改正的基础上,联合监测点与校准基点之间的空间位置关系对监测点进一步进行坐标差分改正,削弱气象因素对角度观测值的影响,确保监测结果精度;并以某水电站大坝边坡监测数据为例,与气象改正、距离差分改正典型的折光改正方法,进行比较评价。结果表明:当采用两步法折光改正模型时,选用两个在空间位置上最邻近的校准基点参与坐标改正为宜;相对于典型的折光改正方法,本方法由于考虑了对受气象因素影响较大的竖直角的折光改正,因而在提升监测点Z方向的精度上具有优势。研究成果为在测量机器人边坡监测任务中选用合适的大气折光改正模型提供了技术参考。
关键词:边坡监测;测量机器人;大气折光;折光改正;校准基点;差分模型;工程测量
引用格式:桑兴旭,肖维,杨松林,肖岚. 2024. 两步法折光改正模型在测量机器人边坡监测中的应用. 时空信息学报, 31(5): 618-625
Sang X X, Xiao W, Yang S L, Xiao L. 2024. A two-step refraction correction model for slope monitoring by measuring robots. Journal of Spatio-temporal Information, 31(5): 618-625, doi: 10.20117/j.jsti.202405009
1 引 言
变形监测是工程测量的重要任务之一,对于及时发现各类变形体的异常情况具有重要意义(郝飞等,2022;吴飞等,2023;夏锐等,2024)。目前,多种监测技术被广泛应用于各类变形监测任务之中(李星宇,2020;肖巍峰等,2020;彭文祥和张德英,2024)。随着全站仪测量精度和自动化程度的提高,测量机器人或智能全站仪的诞生使其在长期、连续、自动的变形监测方面的优势明显(柏文锋,2018;张伟琪等,2019;张思洪和江德军,2021)。国内很多边坡监测都建立了基于测量机器人的外观自动化监测系统(张文等,2018;徐东彪等,2020)。一般通过建设固定测站,在变形体上安置目标棱镜,基于极坐标法、边角交会法及三角高程测量等原理展开周期性的自动化观测,获得目标点的三维坐标并进行变形分析(范本等,2020;王念秦等,2021)。在执行变形监测任务时,确保监测精度对于变形分析的可靠性至关重要(周建国等,2022)。利用测量机器人进行外部变形自动化监测时,除了仪器自身精度导致的观测值误差之外,距离和角度的观测值更易受到外界气象条件的影响,由于自动化监测时无法利用对向观测来消除折光误差,因此必须进行大气折光改正(Stefan和Marek,2014;肖维等,2023)。目前主要的大气折光改正方法是气象元素改正模型、基准点差分改正模型等(Shen等,2017;陈优良等,2020;孙倩雯等,2024)。一方面,气象元素改正模型考虑到电磁波的传播路径与大气折射率n的取值相关,而大气折射率n主要与大气温度、气压及湿度等气象因素相关,因此,气象元素改正模型的本质是利用监测现场的温度、气压及相对湿度,按照一定的改正公式计算得到原始斜距观测值的改正数(李建川等,2018;Yang等,2021;Kobryn,2021)。该方法虽然基本满足了测量规范要求,但仅利用测站点气象数据,信息不够充分。进一步可利用测站与目标站的平均气象元素代表测线气象元素进行气象改正,但测线两端的气象数据只能决定与两端点平均高程对应的大气层的折射率,与电磁波实际路径的折射率不同,由此会引起改正代表性误差(Wei等,2022)。另一方面,对于基准点差分改正模型来说,由若干个基准点求得的相应差分改正系数,处理方式不一,主要是取所有系数的平均值或是中数作为统一改正系数使用,应用至所有监测点的误差改正过程中(江德军等,2019;武致宇等,2019)。这些系数求取方法准确性较低,缺乏对不同监测点与基准点之间空间位置关系的考虑,以及必要的理论精度验证。因此,本文提出一种包括距离改正及坐标改正的两步法折光改正模型。在利用气象改正公式对距离观测值进行改正的基础上,进一步联合监测点与校准基点之间的空间位置关系对监测点进行坐标差分改正,削弱气象条件对角度观测值的影响,确保监测精度;并以某水电站大坝边坡监测数据为例,与气象改正、距离差分改正典型的折光改正方法,进行比较评价。2 两步法折光改正模型原理
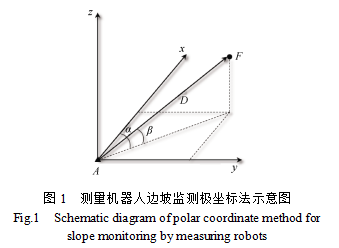
测量机器人边坡自动化监测系统通常采用极坐标法进行测量。以测站点A为原点架设测量机器人,测站铅垂方向为坐标z轴方向,x轴方向由测量机器人定向获得,建立左手系,如图1所示。位于测站点A的测量机器人对监测点F进行观测,获得的观测值包括斜距D、竖直角β和水平角α。则监测点F在测站坐标系中的坐标为
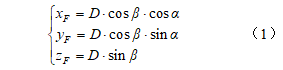
根据误差传播定律可知,监测点F的坐标值精度与斜距D、竖直角β和水平角α的观测精度均有关系。而上述观测值除仪器自身精度之外,还易受到气象因素的影响导致大气折光误差。为了削弱大气折光的影响,需要进行折光改正。传统的气象元素改正模型一般仅对斜距观测值进行了改正,忽略了角度折光误差。对于基准点差分改正模型,在利用若干校准基点求取相应差分改正系数时的处理方式不一,系数求取方法准确性较低,缺乏对不同监测点与校准基点之间空间位置关系的考虑。对此综合上述两类方法的特点,提出一种包括距离改正及坐标改正的两步法折光改正模型。两步法折光改正模型的具体实现流程如图2所示。其具体步骤如下。
1)观测数据获取
在测站点架设测量机器人并安装气象站,在监测区域的各监测点及稳定已知点安装棱镜观测目标。根据监测任务要求,程序自动控制测量机器人定期采集各监测点,以及已知点的水平角、竖直角、斜距与测站点的气象数据。
2)距离观测值的改正
利用气象站采集的气象数据进行第一步改正,即对斜距观测值进行气象改正。设测站到监测点或已知点的斜距观测值为D,根据气象站采集的大气温度、气压及相对湿度数据可计算气象改正数ΔD,改正后的距离可表示为 。同时,利用改正后的斜距
。同时,利用改正后的斜距 和原始的水平角α和竖直角观测值β计算监测点或已知点的三维坐标:
和原始的水平角α和竖直角观测值β计算监测点或已知点的三维坐标:
上述步骤在计算监测点的三维坐标时只对距离观测值进行了折光改正,未考虑角度观测值的折光误差。因此,其坐标仍包含角度折光误差的影响,需要对其进一步采取措施。
3)坐标差分值的计算
由于步骤2)推算的坐标已进行了距离折光改正,可认为推算坐标中仅包含影响角度观测值的折光误差,如大气垂向折光、旁向折光等。对于监测区域内的稳定已知点,设已知坐标为 ,i=1,2,…,N,则可根据各已知点通过步骤2)的推算坐标
,i=1,2,…,N,则可根据各已知点通过步骤2)的推算坐标 ,计算受角度观测值折光误差影响的坐标差:
,计算受角度观测值折光误差影响的坐标差:
4)监测点的坐标差分
对各监测点进行第二步折光改正,设定用于折光改正的已知点,又称校准基点的数量K,依据相似相邻原理逐监测点搜索满足要求的校准基点参与坐标差分改正,得到监测点最终改正坐标 ,j=1,2,…,M。具体过程如下。
,j=1,2,…,M。具体过程如下。
(1)以监测点j的三维推算坐标 为球心,以初始设定的距离阈值如100 m为半径,搜索该范围内是否存在K个校准基点;如不满足该条件,则按设定距离步长阈值如20 m扩大搜索范围,直到搜索范围内存在足够数量的校准基点,如图3所示。
为球心,以初始设定的距离阈值如100 m为半径,搜索该范围内是否存在K个校准基点;如不满足该条件,则按设定距离步长阈值如20 m扩大搜索范围,直到搜索范围内存在足够数量的校准基点,如图3所示。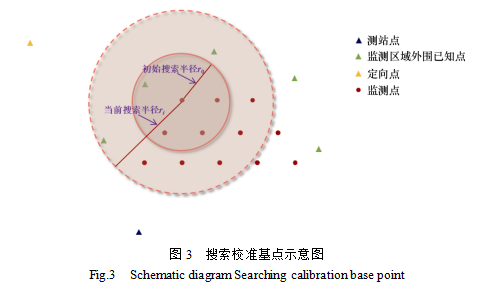
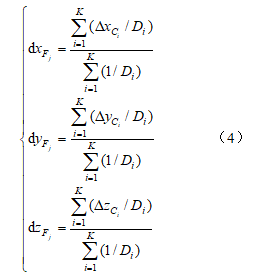
(2)以监测点j 到搜索到满足条件的各校准基点之间的距离Di(i=1,2,…,K)的倒数为权,按式(4)计算当前监测点j的三维坐标分量改正数:
(3)将监测点j 的三维坐标分量改正数与其经距离改正的推算坐标 相加,得到各监测点最终的改正三维坐标:
相加,得到各监测点最终的改正三维坐标:
为了测试方法可行性,利用某水电站大坝边坡测量机器人自动化监测系统采集的观测数据展开分析。该监测系统采用了徕卡TM 50测量机器人,标称测角精度为0.5″,测距精度为0.6 mm±1×10–6 d(d为所测距离,m)。测量机器人安置于大坝右侧上游的观测房内,同时,在测站处设置了气象站同步采集大气温度、气压和相对湿度信息。选取了监测区域内RT04、RT06、RT07、RT08、RT09、RT10、RT11、RT12、RT14、RT15共10个监测点近8个月共计587期的监测数据展开分析。区域内可供选择的校准基点共有3个,分别为RT03、RT05、RT13。由于实验期间各监测点基本没有发生位移,因此,在评价本方法性能时以统计改正后各监测点X、Y、Z三个方向的中误差为依据。
3.1 校准基点数量的影响
本方法在距离改正的基础在搜索一定数量的邻近校准基点进行坐标改正,参与坐标改正的校准基点的数量会对最终改正结果产生影响。首先,对上述10个监测点的距离观测值进行第一步改正;其次,设定采用不同数量的校准基点执行监测点的第二步坐标改正。
区域内共有RT03、RT05、RT13共3个点可作为校准基点参与改正,则分别设定参与坐标改正的校准基点的数量K=1,2,3,对各监测点按距离范围进行搜索最近的K个校准基点进行改正。通过本方法得到,不同数量校准基点下的各监测点X、Y、Z三个方向的中误差结果如图4所示。整体来看,当选用1个校准基点进行坐标改正时,监测值波动大,误差最大;当使用3个基准点进行校正时,监测值最稳定,误差最小。这显示出参与改正的校准基点的数量越多,改正效果越好,但是校准基点个数的增加对改正精度提升并不明显。主要原因是校准基点对监测点的改正效果除了与校准基点数有关外,还与校准基点与监测点的大气折光相关性有关;只有当校准基点与监测点所受大气折光影响强相关时,使用校准基点进行改正才具效果,否则可能无效。实际应用中出于检核考虑,通常选用2个最近的校准基点进行坐标改正为宜。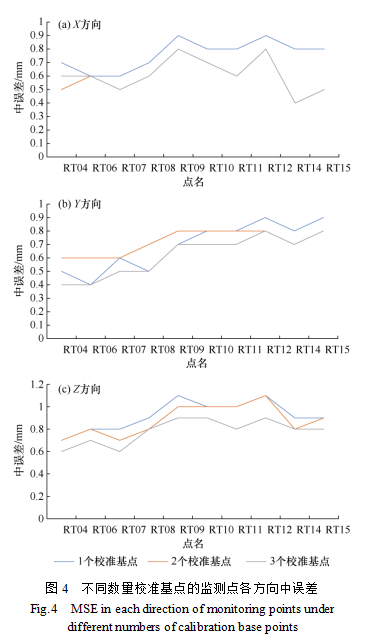
3.2 与典型方法的比较
为了进一步分析方法有效性,对上述监测数据分别采用气象改正、距离差分改正方法及本方法处理后计算各监测点X、Y、Z三个方向的中误差。其中,气象改正方法利用了测站点同步采集的温度、气压和相对湿度信息,距离差分改正方法选择离监测点最近的已知点进行,本方法则是在气象改正的基础上选用3个校准基点进一步执行坐标改正。三种方法的计算结果如表1~3所示。
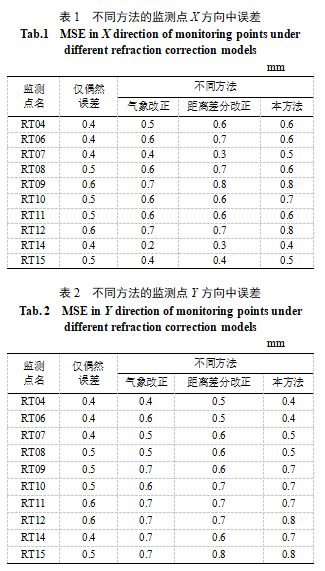
由表1~2可知,不同折光改正模型下各监测点在X、Y方向的中误差几乎无差异。这是因为气象改正、距离差分改正方法均是对监测点的距离观测值进行了改正,本方法虽然通过进一步的坐标差分改正,削弱气象因素对角度观测值的影响,而实际上水平角观测值受气象因素影响较小,因此,本方法在X、Y方向的改正效果与典型方法的差别不大。
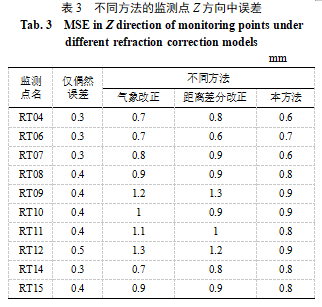
由表3可知,本方法对各监测点Z方向的改正效果整体优于其他两种方法。主要原因在于气象改正、距离差分改正方法没有考虑角度,尤其是受气象因素影响较大的竖直角对监测结果的影响,而本方法在校准基点差分改正阶段有效地削弱了气象因素导致的竖直角误差对监测结果的影响。
综合来看,本方法在改正监测点Z方向的坐标结果上具有优势。
基于测量机器人的自动化监测系统在边坡监测中应用广泛。由于采用单向观测,无法通过合适的观测流程来抵消大气折光对观测值的影响,使得监测成果的可靠性不足。因此,本文提出了应用于测量机器人边坡自动化监测中的两步法折光改正模型,在距离改正的基础上,通过进一步进行坐标差分改正,削弱气象因素对角度观测值的影响。实际案例验证了两步法折光改正模型的可行性与有效性并得出以下结论。
(1)在采用两步法折光改正模型时,通常选用两个在空间位置上最邻近的校准基点参与坐标改正为宜。
(2)相对于典型的折光改正方法,两步法折光改正模型由于考虑了对受气象因素影响较大的竖直角的折光改正,因此,在提升监测点Z方向的精度上具有优势。
研究成果为在测量机器人边坡监测任务中选用合适的大气折光改正模型提供了技术参考。此外,考虑测量机器人执行自动化监测任务时可获取大量的监测数据,未来将探索利用深度学习方法进行大气折光改正的可行性。
柏文锋. 2018. 基于智能全站仪的地铁隧道自动化监测精度分析及验证. 测绘通报, (11): 107-110[Bai W F. 2018. Analysis and validation of subway tunnel automatic monitoring accuracy based on intelligent total station. Bulletin of Surveying and Mapping, (11): 107-110 (in Chinese)]
陈优良, 卞焕, 肖钢, 朱倩, 李远文. 2020. 测量机器人自动极坐标二次基准差分改正方法. 测绘科学, 45(8): 33-40[Chen Y L, Bian H, Xiao G, Zhu Q, Li Y W. 2020. Method for correcting quadratic reference difference of automatic polar coordinates of measuring robot. Science of Surveying and Mapping, 45(8): 33-40 (in Chinese)]范本, 胡祝敏, 胡伦俊. 2020. 基于徕卡测量机器人的山区边坡地质失稳监测研究. 灾害学, 35(3): 29-33[Fan B, Hu Z M, Hu L J. 2020. Geological instability monitoring of mountain slopes based on leica geometry robot. Journal of Catastrophology, 35(3): 29-33 (in Chinese)]郝飞, 雷鹏, 李想, 苗壮, 陈鹏, 闫云峰, 李中为, 翟宇峰. 2022. 基于PS-InSAR的输电塔结构及沿线地质监测技术. 地理信息世界, 29(1): 88-92[Hao F, Lei P, Li X, Miao Z, Chen P, Yan Y F, Li Z W, Zhai Y F. 2022. Transmission structure and geological monitoring along the transmission line based on PS-InSAR technology. Geomatics World, 29(1): 88-92 (in Chinese)]江德军, 黄会宝, 柯虎, 熊小虎. 2019. 多重极坐标分层差分在瀑布沟水电站变形监测中的应用. 水力发电, 45(10): 106-110[Jiang D J, Huang H B, Ke H, Xiong X H. 2019. Application of multiple polar coordinate hierarchical difference in deformation monitoring of Pubugou hydropower station. Water Power, 45(10): 106-110 (in Chinese)]李建川, 张宇, 史波. 2018. 高边坡变形监测电磁波测距边长气象改正方法. 人民长江, 49(4): 56-60[Li J C, Zhang Y, Shi B. 2018. Study on atmospheric correction methods of electromagnetic distance measurement in high slope deformation monitoring. Yangtze River, 49(4): 56-60 (in Chinese)]李星宇. 2020. 滑坡变形高精度智能化监测预警技术研究与实践. 中国地质灾害与防治学报, 31(6): 21-29[Li X Y. 2020. Research and practice of high-precision intelligent monitoring and early warning technology for landslide deformation. The Chinese Journal of Geological Hazard and Control, 31(6): 21-29 (in Chinese)]彭文祥, 张德英. 2024. 基于LSTM与Transformer的地面沉降智能预测方法研究——以上海市为例.时空信息学报, 31(1): 94-103[Peng W X, Zhang D Y. 2024. Research on land subsidence intelligent prediction method based on LSTM and transformer: A case study of Shanghai. Journal of Spatio-temporal Information, 31(1): 94-103 (in Chinese)]孙倩雯, 周建国, 刘冠兰. 2024. 基于神经网络的测量机器人大坝监测观测值折光修正. 中国农村水利水电, (4): 187-192[Sun Q W, Zhou J G, Liu G L. 2024. Refraction correction of dam monitoring observations using robotic total station based on neural network. China Rural Water and Hydropower, (4): 187-192 (in Chinese)]王念秦, 申辉辉, 鲁兴生. 2021. 边坡变形监测技术发展现状及问题对策. 科学技术与工程, 21(19): 7845-7855[Wang N Q, Shen H H, Lu X S. 2021. Development status and problem countermeasures of slope deformation monitoring technology. Science Technology and Engineering, 21(19): 7845-7855 (in Chinese)]吴飞, 黄英华, 胡静云. 2023. 基于测量机器人的高陡边坡变形测量精度研究与实践. 矿业研究与开发, 43(2): 149-156[Wu F, Huang Y H, Hu J Y. 2023. Research and practice of high and steep slope deformation measurement accuracy based on measuring robot. Mining Research and Development, 43(2): 149-156 (in Chinese)]武致宇, 张献州, 黎冶, 李京强. 2019. 最小二乘拟合的多基准站实时差分改正法. 测绘科学, 44(9): 29-34[Wu Z Y, Zhang X Z, Li Y, Li J Q. 2019. Multiple base station’s real-time differential correction method based on least squares fitting. Science of Surveying and Mapping, 44(9): 29-34 (in Chinese)]夏锐, 徐华龙, 徐正国, 马旭伟. 2024. 基于SBAS-InSAR的地表沉降监测及漏斗拟合分析. 时空信息学报, 31(4): 513-523[Xia R, Xu H L, Xu Z G, MA X W. 2024. Monitoring of surface subsidence and funnel fitting analysis based on SBAS-InSAR. Journal of Spatio-temporal Information, 31(4): 513-523 (in Chinese)]肖巍峰, 杨文涛, 李朝奎, 田辉彬, 郑敦勇,卜璞. 2020.基于PS-InSAR数据的北京市地面沉降影响因素及其交互作用探测.地理信息世界, 27(6): 7-13[Xiao W F, Yang W T, Li C K, Tian H B, Zheng D Y, Bu P.2020.Detection of influence factors and their interaction of land subsidence in Beijing based on PS-InSAR. Geomatics World, 27(6):7-13 (in Chinese)]肖维, 杨松林, 韩行进, 孙倩雯, 周建国. 2023. 测量机器人大坝变形自动化监测中的大气折光修正研究. 水电能源科学, 41(4): 110-113[Xiao W, Yang S L, Han X J, Sun Q W, Zhou J G. 2023. Research on refraction correction of automatic dam deformation monitoring with robotic total station. Water Resources and Power, 41(4): 110-113 (in Chinese)]徐东彪, 张永光, 刘朋俊, 黄声享, 杨广君, 丁万庆. 2020. 自动化变形监测系统开发及在滑坡监测中的应用. 地理信息世界, 27(1): 96-100[Xu D B, Zhang Y G, Liu P J, Huang S X, Yang G J, Ding W Q.2020. The development of automatic deformation monitoring system based on georobot and application in landslide monitoring. Geomatics World, 27(1):96-100 (in Chinese)]张思洪, 江德军. 2021. 高精度地表三维位移自动化监测技术研究与应用. 长江科学院院报, 38(1): 66-71[Zhang S H, Jiang D J. 2021. Automatic 3D high-precision monitoring technology for surface displacement: Research and application. Journal of Yangtze River Scientific Research Institute, 38(1): 66-71 (in Chinese)]张伟琪, 王利, 曲轩宇. 2019. 基于测量机器人的黄土滑坡变形监测及结果分析. 测绘工程, 28(3): 66-69, 75[Zhang W Q, Wang L, Qu X Y. 2019. Deformation monitoring and result analysis of loess landslide based on geo-robot. Engineering of Surveying and Mapping, 28(3): 66-69, 75 (in Chinese)]张文, 黄声享, 李洋洋. 2018. 基于测量机器人的自动化变形监测系统设计与实现. 测绘工程, 27(2): 37-41[Zhang W, Huang S X, Li Y Y. 2018. Design and implementation of automatic deformation monitoring system based on georobot. Engineering of Surveying and Mapping, 27(2): 37-41 (in Chinese)]张永红, 陈军. 2023. 我国地面沉降状况及其对国土空间规划的影响探讨—— 以北京市为例. 时空信息学报, 30(4): 465-473 [Zhang Y H, Chen J. 2023. Discussion on the ground subsidence status in China and its impact on national spatial planning: A case study of Beijing. Journal of Spatio-temporal Information, 30(4): 465-473(in Chinese)]周建国, 赵思琦, 史波, 黎建洲. 2022. 基于测量机器人的大坝外观监测精度影响因素研究. 人民长江, 53(9): 115-120, 162[Zhou J G, Zhao S Q, Shi B, Li J Z. 2022. Research on accuracy influencing factors of dam deformation automatic monitoring based on robotic total stations. Yangtze River, 53(9): 115-120, 162 (in Chinese)]Kobryń A. 2021. Modelling of the refraction in trigonometric levelling using polynomial transition curves. Measurement, 181: 109392Shen Y Q, Huang T, Guo X T, Zang Q B, Herrero-Huerta M. 2017. Inversion method of atmospheric refraction coefficient based on trigonometric leveling network. Journal of Surveying Engineering, 143(1): 06016002Stefan S, Marek B. 2014. The elimination of vertical refraction in trigonometric measurements of height differences. Acta Montanistica Slovaca,19(2): 90-94Wei L H, Zhang J Q, Ao M, Liu S J, Mao Y C. 2022. High-precision trigonometric leveling based on correction with atmospheric refraction coefficient model. Journal of Surveying Engineering, 148(3): 04022005Yang D L, Zou J G, Shen Y W, Zhu H B. 2021. Research and application of trigonometric leveling to replace precise leveling. Journal of Surveying Engineering, 147(3): 04021012
点我访问原文链接
