《时空信息学报》是由自然资源部主管,国家基础地理信息中心、中国地理信息产业协会、黑龙江测绘地理信息局共同主办的中文学术期刊,双月刊。为分享最新研究成果,搭建学术交流平台,中国地理信息产业协会公众号开设“时空信息学报”专栏,独家刊载《时空信息学报》论文,供广大读者研阅。1月2日起,陆续刊发2024年第5期的10篇论文。欢迎产学研用各界关注、分享!
基于改进YOLOv8的前视影像的路面病害检测方法
赫英策1,2,李禹萱1,2 ,孙尚宇1,2,宋伟东1,2
1. 辽宁工程技术大学 测绘与地理科学学院,阜新 123000;
2. 辽宁工程技术大学 地理空间信息服务协同创新研究院,阜新 123000
摘 要:基于深度学习的图像目标检测方法具有检测精度高、检测速度快等优点,广泛应用于路面病害检测中,目前研究多关注俯视影像的路面病害检测,前视影像中复杂场景对检测精度影响的研究尚不足。本文基于YOLOv8(you only look once version 8)提出一种路面病害检测模型YOLO-RMID(road maintenance inspection detection)。利用Mask掩模将天空与地面分隔开,屏蔽空中悬挂输电线区域;将注意力机制融入主干特征提取部分中的快速空间金字塔池化(spatial pyramid pooling fast,SPPF)模块,提高裂缝所在区域权重;在特征融合部分中通过将BiFusion模块与RepBlock模块相结合,构建多尺度融合特征BFRB(BiFusion RepBlock)结构,提高模型对路面病害的感知能力;为验证方法可行性,制作路面病害数据集LNTU_RMID,结合公开数据集RDD2022,与常用的MUENet、CrackYOLO及DGE-YOLO-P模型进行对比评价。结果表明,本方法的综合性能相对最优,平均精度分别提高了约6.7%、5.4%、6.6%。
关键词:路面病害检测;深度学习;SPPF;YOLOv8;多尺度;mAP
引用格式:赫英策, 李禹萱, 孙尚宇, 宋伟东. 2024. 基于改进YOLOv8的前视影像的路面病害检测方法. 时空信息学报, 31(5): 605-617
He Y C, Li Y X, Sun S Y, Song W D. 2024. A method for detection of pavement defects in front-view images based on improved YOLOv8. Journal of Spatio-temporal Information, 31(5): 605-617, doi: 10.20117/j.jsti.202405001
1 引 言
道路安全问题至关重要,路面病害是威胁道路安全的重要因素之一(李朝勇等,2023)。路面病害对道路的使用寿命和安全构成很大威胁,及早发现路面病害对维护和管理非常重要(Ren等,2024)。目前,针对图像中路面病害检测或相关的,如自动驾驶软件中处理的路面图像,通常为俯视影像(Qin等,2021;Zhang等,2024;李禹萱等,2024)。实际工程中,公路养护巡检通常获取的是前视路面影像。前视路面影像中的路面病害特征会因为透视关系而发生变形,较远一侧的路面病害可能被遮挡或由于透视效果难以检测;且前视路面影像通常是由安装在车顶或车辆前方的CDD相机获取的,视野范围主要集中在车辆前方,检测范围相对较小,存在输电线、行道树、交通信号灯等多种干扰因素;前视方向与太阳光线的角度不断变化,前视路面影像中光照和阴影的变化更加复杂;同时,由于巡检路段随时间变换,前视路面影像中的场景会不断变换。因此,研究基于前视图影像的路面病害检测模型具有重要意义。
深度学习方法主要应用于影像分类、信息提取及变化检测(王诗洋等,2021)。近年来,随着遥感技术不断发展,针对遥感影像的自动识别,提取遥感信息和地物信息并进行分析的研究越来越多(朱小凡等,2024)。基于深度学习的目标提取方法与传统方法最大的区别在于不需人为给出特征,在背景复杂多样、图像特征类似且道路类型多变的遥感图像中也能够得到较高的提取精度(廉慧洁等,2023),基于深度学习的目标检测方法具有检测精度高、检测速度快等优点,广泛应用于路面病害检测中,目前主要分为基于数据增强和基于模型改进两大类。前者主要考虑场景、样本数量、数据质量等对路面病害检测的影响,对数据增强处理,提高检测准确率。如侯越等(2022)采用WGAN-GP与泊松迁移算法相融合的数据深度增强方法,对路面影像进行增强处理;王青宁(2022)设计了一种基于FNLM-Frangi滤波的路面病害检测算法,解决了因车速过快导致影像检测精度下降的问题;郭晨等(2024)基于Transformer模型,使用直方图均衡技术处理图像,提高了网络检测路面病害精度。后者主要通过改进模型减少样本特性、场景等的影响。如喻露等(2023)基于YOLOv5(you only look once version 5)网络提出IMUENetv5算法,通过引入空洞卷积和SE-Net注意力机制,提高了模型对路面病害识别的检测能力;Li等(2024)引入了CrackConv、ADSample、CAS、MSConv和MSHead等模块改进裂缝特征提取并解决了阴影和可变裂缝尺度等问题;钟山等(2023)针对路面光照条件多样性,提出了一种基于YOLOv7网络添加光照约束网络的路面病害检测模型,实现了低光照图像自适应增强,解决了低光场景下路面病害检测精度低的问题。
因此,路面病害检测中图像处理方法取得了丰富的成果,但上述已有研究主要是对路面俯视影像,对前视影像的研究尚不多见。在充分了解病害的种类、分布及属性等现状信息后(吕书强等,2022),实验采用公路养护巡检系统拍摄的前视影像制作了数据集LNTU_RMID(road maintenance inspection detection),针对阴影、裂缝修补、路面标识线破损和空中悬挂输电线对路面病害检测的干扰,研究基于前视影像的路面病害检测模型YOLO-RMID。通过在模型中添加Mask掩模,解决将空中悬挂输电线误检为裂缝的问题;改进快速空间金字塔池化(spatial pyramid pooling fast,SPPF)模块,解决将路面标识线破损和裂缝修补误检为裂缝的问题;构建多尺度融合特征的BFRB(BiFusion RepBlock)结构,解决阴影覆盖路面病害产生的检测精度低的问题。为验证方法可行性,结合公开数据集RDD2022,与常用的MUENet模型、CrackYOLO模型及DGE-YOLO-P模型进行对比评价。
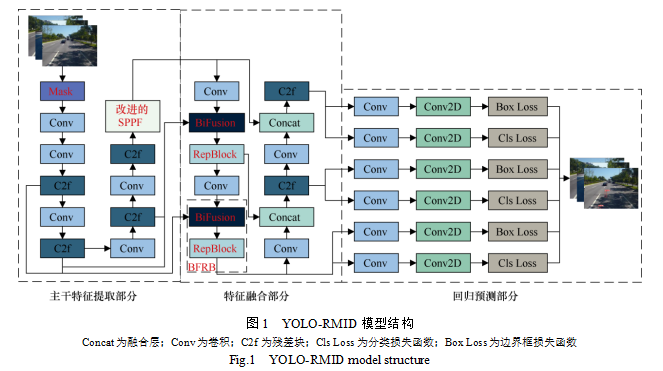
YOLOv8检测模型是由主干特征提取、特征融合和预测回归三部分构成。主干特征提取网络是模型的基础,可以从输入图像中提取检测目标的关键特征,为后续网络层进行的目标检测提供信息支持。在YOLOv8中,主干网络采用了CSPDarknet结构;预测回归部分是目标检测模型的决策部分,负责产生并输出模型的检测结果;特征融合部分位于主干特征提取部分和预测回归部分之间,负责目标特征的融合与增强(Varghese和Sambath,2024)。
YOLO-RMID模型结构如图1所示。在主干特征提取部分中添加Mask掩模,使其屏蔽模型检测为空中悬挂输电线区域;将注意力机制融入主干特征提取部分中的SPPF模块,提高裂缝所在区域权重;在特征融合部分中通过将BiFusion模块(Chen等,2021)与RepBlock模块(Li等,2022)相结合,构建BFRB结构,提高模型对路面病害的感知能力。
根据输入的影像信息和掩模尺寸,Mask掩模创造一个布尔矩阵,加权至每幅影像中。根据掩模尺寸,掩模区域标注0,其他区域标注1,来区分影像检测区域。为更好地体现出掩模覆盖区域,用透明度为50%的RGB(255,0,0)来表现掩模: 
式中,F为输入图像矩阵;B为创造布尔矩阵函数;x1、x2、y1、y2为掩模区域数据;M为输出图像矩阵;AW为加权函数。Mask掩模结构如图2所示。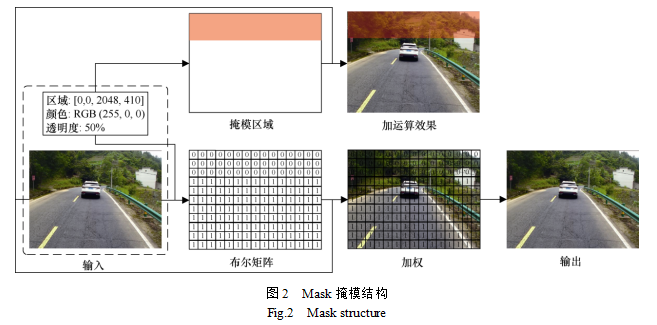
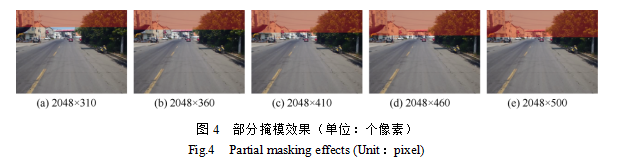
在公路日常养护巡检中,利用作者团队自主研发的公路综合信息采集车获取了原始路面图像数据,构建了路面病害数据集LNTU_RMID,包含了共12678幅分辨率为2048个像素×1536个像素的原始图像。本文以2048个像素×400个像素为基础掩模尺寸,像素纵坐标每10个像素值为一个变化单元,选取2048个像素×300个像素~2048个像素×500个像素共21组不同的掩模尺寸进行对比,以模型平均精度(mean average precision, mAP)为评判指标,选取mAP最高的掩模尺寸。图3展示了mAP和像素的折线变化,图4展示了5组添加不同尺寸掩模的实际效果。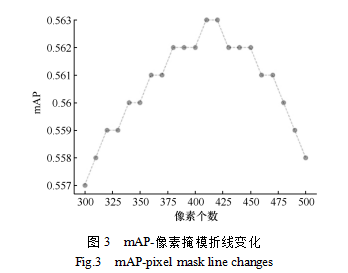
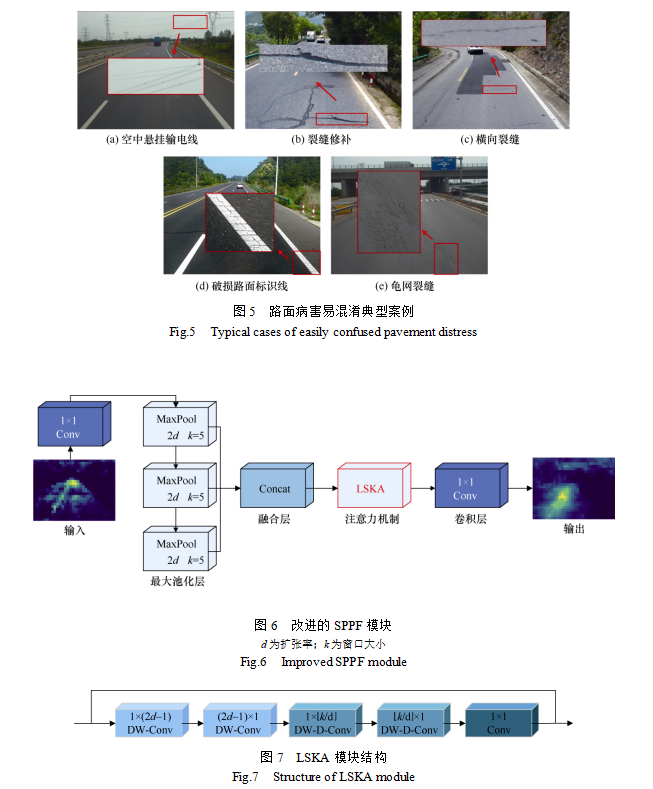
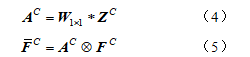
由图5看出,空中悬挂输电线纹理、裂缝修补纹理、破损路面标识线纹理与裂缝纹理相似,且部分路面标识线破损和裂缝修补与路面病害距离较近,因此,图像分类时易混淆。改进的SPPF模块结构如图6所示。实验通过在SPPF模块中引入大型分离卷积注意力(large separable kernel attention,LSKA)(Lau等, 2024),提高影像中路面病害区域的权重。LSKA利用深度可分离卷积及深度膨胀可分离卷积捕捉影像的上下文信息,生成注意力图。根据注意力图加权原始特征,增强对路面病害的关注度,从而提高模型判别能力。LSKA采用大卷积核设计,由两个一维深度膨胀卷积(depth wise convolution,DW-Conv)、两个一维深度膨胀可分离卷积(depth wise dilated convolution,DW-D-Conv)和一个一维卷积(convolution,Conv)组成,结构如图7所示。具体步骤如下所述。
(1)两个一维DW-Conv分别负责提取输入特征图的水平和垂直方向的特征,使模型初步聚焦于路面病害区域并初步赋予权重:

式中,C为输入通道数;H、W分别为特征图的高度和宽度;W为卷积核; 为深度膨胀卷积的输出,核大小为
为深度膨胀卷积的输出,核大小为 。(2)两个一维DW-D-Conv分别沿水平和垂直方向进一步提取路面病害特征,捕捉更广泛的上下文信息,增强模型对图像中空间关系的理解,对聚焦区域进行细节的补充并重新赋予权重: 式中,
。(2)两个一维DW-D-Conv分别沿水平和垂直方向进一步提取路面病害特征,捕捉更广泛的上下文信息,增强模型对图像中空间关系的理解,对聚焦区域进行细节的补充并重新赋予权重: 式中, 为深度膨胀可分离卷积输出的全局空间信息。
为深度膨胀可分离卷积输出的全局空间信息。(3)通过一个一维Conv融合得到特征:
式中, 为输出特征图;A为注意力图。
为输出特征图;A为注意力图。
2.3 BFRB结构构建
路面巡检过程中存在场景亮度不一和路面病害被阴影覆盖的情况,使得模型无法学习到完整特征,导致路面病害检测结果精度低。因此在特征融合部分中,首先引入BiFusion模块(Chen等,2021),对三种不同尺度的上下文特征进行融合分析,得到具有多尺度特征的特征图,增强提取路面病害的边缘特征;其次引入RepBlock模块(Li等,2024),对融合分析后的结果进行多分支卷积运算,根据输入输出维度提取多尺度特征图中的路面病害特征,两个模块构成BFRB结构。
1)BiFusion模块
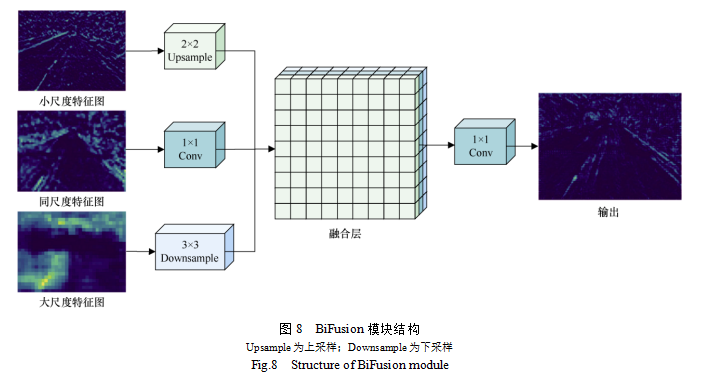
BiFusion模块可以通过跨层级的特征融合,将低级语义的特征与高级语义的特征进行结合,建立金字塔特征映射(杨琴和安见才让,2024)。由图8看出,BiFusion模块原理是对同尺度特征图使用1×1卷积降维,对大尺度特征图使用3×3步长为2的卷积进行下采样,对小尺度特征图使用2×2的转置卷积进行上采样。最后将这三部分得到的特征图经过融合层进行融合,使用1×1卷积降维后,输出具有多尺度特征的特征图。BiFusion模块原理为

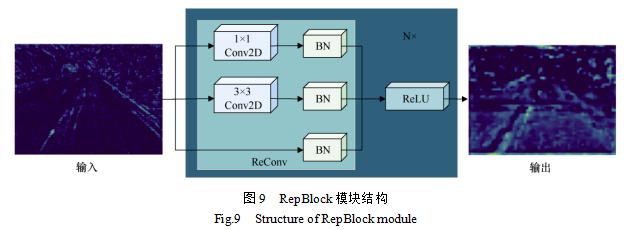
RepBlock模块根据输入输出维度选择分支,对融合后的特征层进行多次重参数化卷积运算,用ReLU激活函数将特征保留并映射输出(Li等,2024)。RepBlock模块结构如图9所示。当输入输出维度分别为相等、不相等时的重卷积(ReConv)原理:

式中,BN为批量规范化函数;W(3)为一个输入通道为C1输出通道为C2的3×3卷积层;W(1)为1×1卷积层; 分别为3×3卷积层后BN的均值、方差、缩放因子、偏置;
分别为3×3卷积层后BN的均值、方差、缩放因子、偏置; 分别为卷积后的BN对应上述参数;
分别为卷积后的BN对应上述参数; 分别为ID识别分支的BN对应上述参数。
分别为ID识别分支的BN对应上述参数。
2.4 损失函数
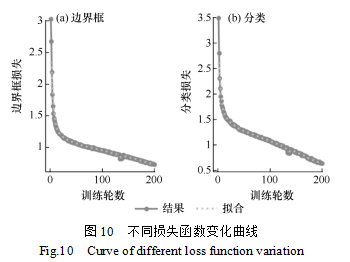
采用CIoU损失和Clf损失作为Box损失,BCE损失作为Cls损失分别衡量目标检测模型中预测框位置与真实框位置之间的差异和目标检测模型对不同类别进行分类的准确性。当Box损失较低时,表示模型能够准确地预测目标的位置;当Cls损失较低时,表示模型在区分不同类别时具备较高精度(Varghese等,2024):
式中,w、h分别为预测框的宽和高;wgt、hgt分别为真实框的宽和高;b、bgt分别为预测框和真实框的边界中心点;ρ为b和bgt之间的欧几里得距离;wc、hc分别为预测框和真实框的最小外接矩形的宽、高;为交并比;pi为模型输出;yi为真实标签;N为训练批次大小;i为第i个样本。
3 实验与结果分析
3.1 实验数据
依据《公路技术状况评定标准》(JTG5210—2018)对横向裂缝、纵向裂缝、龟网裂缝和坑槽的叙述,使用Labelimg对LNTU_RMID数据集中影像进行标注。根据影像数量,以8︰1︰1随机划分为训练集、验证集和测试集。为得到模型最优的检测性能,在训练后调整模型检测参数,通过验证集进行精度验证。为验证普适性,选取RDD2022数据集中纵向裂缝、横向裂缝、龟网裂缝及坑槽四类基本路面病害和LNTU_RMID数据集分别对YOLO-RMID模型进行训练。RDD2022是关于道路损伤的公开数据集,包含来自中国、印度及美国等六个国家的47420幅道路图像(Arya 等,2024)。四类路面病害数据分布见表1。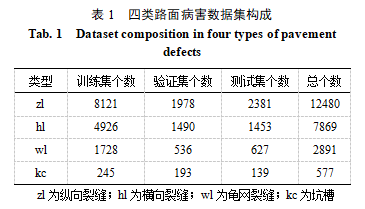
实验采用Python作为开发语言,基于开源深度学习框架PyTorch构建了神经网络结构。选用Intel i7-11800H处理器,16 GB运行内存,运行内存8GB NVIDIA RTX 3060显卡的硬件测试环境。为保模型的有效训练与性能优化,统一参数配置,学习率设定0.001,批次大小设定8,训练轮数设定200,工作线程设定4,输入图像尺寸设定1048,其他参数为YOLOv8n模型的默认参数。
3.2 评价方法
评价指标采用召回率(recall,Re)、精确率(precision,Pr)、F1分数(F1-score,F1)、各类别平均精确率(average precision,AP)、帧每秒(frames per second,FPS)和各类别 mAP。Re为正确检测到的病害数占应该被正确检测到的病害数的比例,Pr为正确检测到的病害数占所有检测到的病害数的比例。Pr和Re互相影响,当追求高Re时,易导致Pr下降,即出现误检情况;反之,出现漏检。F1为加权平均,值越大说明模型性能越好;FPS为帧率;mAP为AP的平均值,体现了目标检测模型的综合性能:
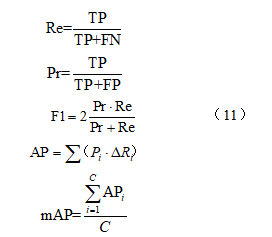
式中,TP为被模型检测到并正确分类的病害数量;FN为属于病害但是没有被正确检测出来的病害数量;FP为被错误识别成病害的背景区域数量;Pi为在第i个召回率下的准确率;ΔRi为第i、i+1个召回率之间的差值;C为检测类别数量。3.3 结果与评价
对LNTU_RMID数据集训练时,本方法损失函数的变化曲线如图10所示。
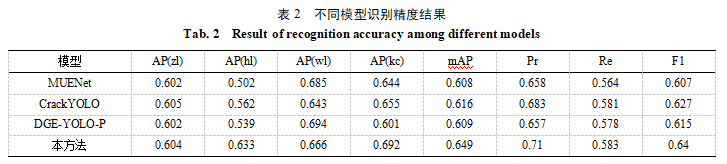
为验证性能,在添加Mask掩模的基础上,选用常用路面病害检测模型MUENet(He等,2023)、CrackYOLO(Li 等,2024)、DGE-YOLO-P(胥铁峰等,2024)模型与本方法进行对比实验。在LNTU_RMID数据集的总体识别精度结果见表2。相比于MUENet、CrackYOLO、DGE-YOLO-P模型,本方法mAP分别提升了约6.7%、5.4%、6.6%。本方法整体检测精度均有提升,对横向裂缝、坑槽的检测AP最高,DGE-YOLO-P模型对龟网裂缝的检测AP最高,CrackYOLO模型对纵向裂缝的检测AP最高。本方法对前视路面影像的路面病害检测具有较好的检测效果,如图11所示。
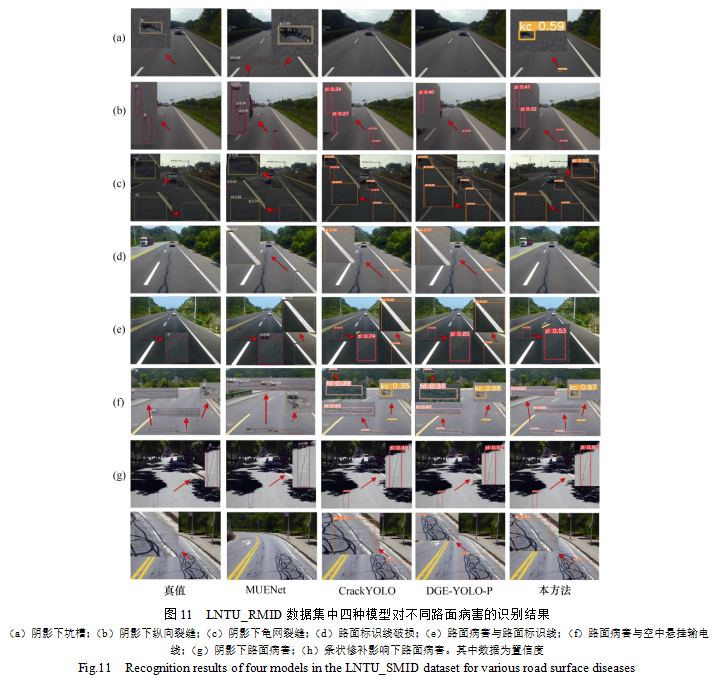
由图11看出,(a)至(c)在光线较暗的环境下,CrackYOLO模型存在重复识别、误识别,MUENet模型存在误检和漏检,DGE-YOLO-P模型存在漏检、重复检测,本方法检测效果最好。(d)(e)存在破损道路标识线,CrackYOLO、MUENet和DGE-YOLO-P模型将路面标识线破损检测为龟网裂缝。(f)所示场景中存在空中悬挂输电线,CrackYOLO、DGE-YOLO-P模型将空中悬挂输电线误检为横向裂缝。(g)所示样本均有部分被阴影覆盖,CrackYOLO、MUENet和DGE-YOLO-P模型存在检测不完整,CrackYOLO模型将裂缝修补误检为纵向裂缝,本方法效果最好且不存在误检。(h)所示龟网裂缝样本与裂缝修补混淆在一起,CrackYOLO模型未识别出龟网裂缝,MUENet、DGE-YOLO-P模型均将部分裂缝修补识别为龟网裂缝的一部分,本方法结果与真值差异最小。
分别使用MUENet、CrackYOLO、DGE-YOLO- P模型及本方法分别在RDD2022数据集上进行训练、验证和检测。各模型在RDD2022数据集的精度结果见表3。相比于MUENet模型,本方法对龟网裂缝的检测AP有了明显提升,对纵向裂缝和横向裂缝的检测AP小幅度下降;mAP提升了约1.1%。相比于CrackYOLO模型,本方法对纵向裂缝、横向裂缝和坑槽的检测AP小幅度下降,对龟网裂缝的检测AP有较大幅度提升,Re提升了约1.3%。相比于DGE-YOLO-P模型,本方法对四个类别的检测精度均有小幅度提升。
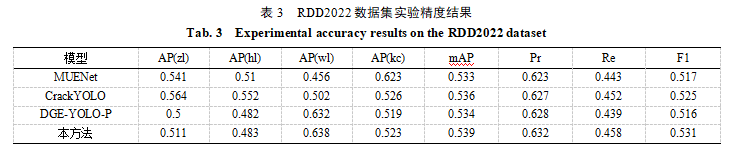
虽然CrackYOLO模型可以增强特征提取改善模型对路面病害的识别效果,MUENet模型改进了对裂纹基本形态特征的提取,但会将空中悬挂输电线误识别为裂缝。RDD2022数据集中较多影像背景存在复杂的空中悬挂输电线,因此,相较于CrackYOLO模型,虽然本方法提取特征能力较弱,但能够有效地分离路面及非路面区域。同时,本方法具有较好的普适性。MUENet、CrackYOLO及DGE-YOLO-P模型对RDD2022数据集进行检测时,由于阴影、路面标识线破损和空中悬挂输电线的干扰出现了漏检、误检和重复检测,且完整度较低;本方法对RDD2022数据集进行检测时,完整度和精确度有了一定程度的提升,如图12所示。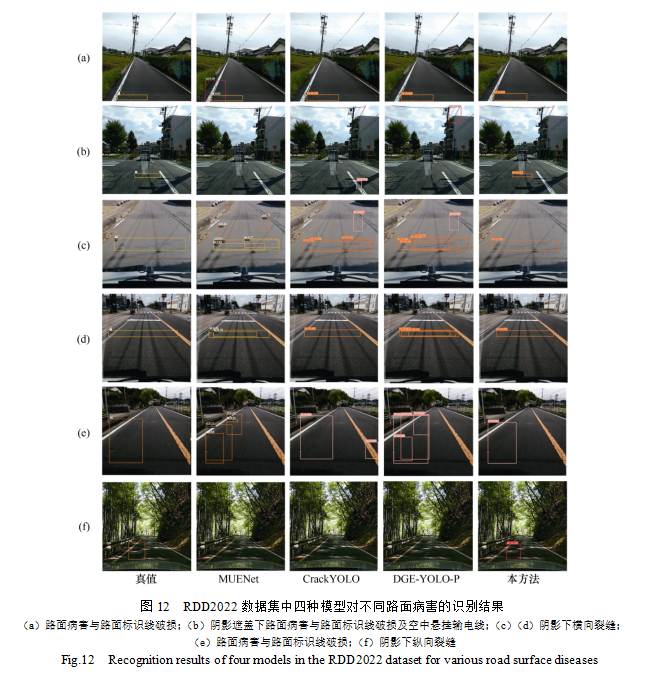
3.4 模型有效性分析
为验证方法有效性,使用在YOLOv8模型上添加Mask掩模、改进SPPF模块的Y+M+改进SPPF模型、在YOLOv8模型上添加Mask掩模、BFRB结构的Y+M+B模型,以及本方法分别在LNTU_ RMID数据集上对比分析。实验对LNTU_RMID数据集识别结果如表4所示。相对于Y+M+改进SPPF模型,本方法在数据量不变的情况下,模型处理速度稍有减小,但模型的mAP、Pr、Re、F1,以及对横向裂缝的AP 结果均有所提高;相对于Y+M+B模型,本方法虽然数据量增大了,但模型处理速度有所提高。

由表1、4知,实验数据集样本中纵向裂缝数量最多、坑槽的数量最少,本方法中相比于其他三种路面病害,纵向裂缝的检测AP最低,坑槽的检测AP最高。究其原因:①多数坑槽尺度较小,BFRB结构可以提取到较为完整的坑槽特征信息;②纵向裂缝的数量较多,基于路面前视影像的检测中空间距离导致纵向裂缝的尺度差异较大,虽然BFRB结构可以对纵向裂缝进行多尺度的特征提取,但效果有限。相较于其他两种模型,本方法对横向裂缝的检测AP最优。究其原因,前视影像中,拍摄角度会使得横向裂缝的宽度产生变形,长宽比加大;SPPF模块可以提高路面病害区域的权重,间接扩大了路面病害的特征。因此,改进SPPF模块的引入使得BFRB结构可以提取到横向裂缝的特征增加。综上所述,本方法对路面病害的检测效果较理想。由图13可看出,(a)虽然Y+M+B模型较完整地识别了裂缝特征,也识别了裂缝修补特征,但本方法可以准确地识别多数被阴影覆盖的裂缝特征;(b)Y+M+改进SPPF模型未识别出路面标识线破损的特征;(c)Y+M+B模型感受野的增大,混淆了裂缝修补特征和龟网裂缝特征,但识别了车辙特征;本方法可以识别出完整的龟网裂缝特征。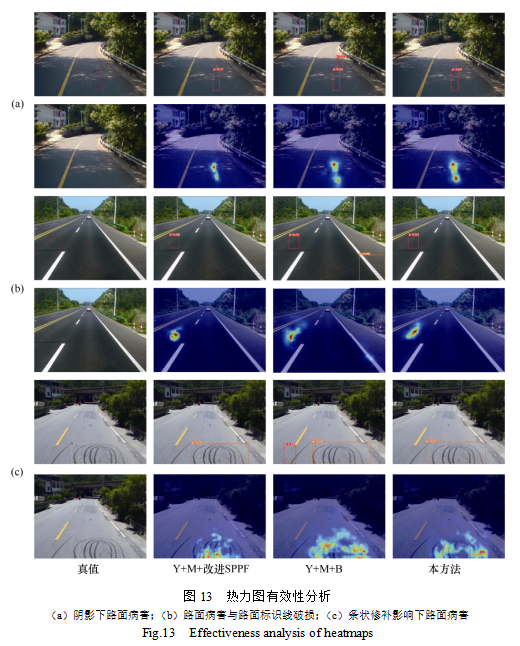
基于深度学习的图像目标检测方法具有检测精度高、检测速度快等优点,广泛应用于路面病害检测中,目前研究多关注俯视影像的路面病害检测。针对公路养护巡检系统采集的路面前视影像数据,创建了LNTU_RMID数据集,基于YOLOv8模型构建了YOLO-RMID方法,对路面病害检测方法进行了探讨。
利用Mask掩模,以减少将空中悬挂输电线误判为裂缝;通过改进的SPPF模块,解决了由于光照和阴影的干扰导致的路面病害检测精度低;结合BiFusion、RepBlock模块,构建BFRB结构,以减少模型对裂缝修补、路面标识线破损的错误检测;并与常用的MUENet(He等,2023)、CrackYOLO(Li 等, 2024)、DGE-YOLO-P(胥铁峰等,2024)三种路面病害检测模型,通过在LNTU_RMID、RDD2022数据集上分别进行了比较分析。结果表明,本方法的综合性能相对最优,平均精度分别提高了约6.7%、5.4%、6.6%。这说明,研究成果在路面前视影像的检测任务上更有优势,可以为路面病害检测及自动驾驶中高精度地图导航等相关研究提供技术参考。
尽管本方法可以减轻阴影覆盖、空中悬挂输电线、路面标识裂缝等干扰项给常见路面病害类型检测带来的不利影响,但是,依然存在将井盖和坑槽混淆,将沥青接缝和裂缝混淆的问题。未来研究将丰富LNTU_RMID数据集井盖和沥青接缝两个类别,并从增强特征提取、聚焦局部特征等方法,进一步优化提高模型的检测精度。
郭晨, 杨玉龙, 左琛, 杨冰鑫. 2024. 基于Swin Transformer的沥青路面病害分类检测研究. 计算机测量与控制, 32(2): 114-121[Guo C, Yang Y L, Zuo C, Yang B X. 2024. Research on classification and detection of the asphalt pavement diseases based on swin transformer. Computer Measurement & Control, 32(2): 114-121 (in Chinese)]
侯越, 张慧婷, 高智伟, 王大为, 刘鹏飞, Markus OESER, Linbing WANG, 陈宁. 2022. 基于数据深度增强的路面病害智能检测方法研究及比较. 北京工业大学学报, 48(6): 622-634[Hou Y, Zhang H T, Gao Z W, Wang D W, Liu P F, Oeser M, Wang L B, Chen N. 2022. Research and comparison of intelligent detection methods of pavement distress based on deep data augmentation. Journal of Beijing University of Technology, 48(6): 622-634 (in Chinese)]李朝勇, 张成, 韦海丹. 2023. 基于多尺度特征融合网络的路面裂缝分割方法研究. 时空信息学报, 30 (3): 425-430[Li C Y, Zhang C, Wei H D. 2023. Research on pavement crack segmentation method based on multi-scale feature fusion network. Journal of Spatio-temporal Information, 30 (3): 425-430]李禹萱, 宋伟东, 孙尚宇, 张晋赫. 2024. 基于改进Swin- Transformer的农村路面裂缝检测算法. 北京交通大学学报. https://kns.cnki.net/kcms/detail/11.5258.U.20240928.1336.002.html.[2024-09-29][Li Y X, Song W D, Sun S Y, Zhang J H. 2024. Rural pavement crack detection algorithm based on improved Swin-Transformer. Journal of Beijing Jiaotong University. https://kns.cnki.net/kcms/detail/11.5258.U.20240928.1336.002.html. [2024-09-29] (in Chinese)]廉慧洁, 王维高, 朱军, 唐苒然, 谢亚坤. 2023. 一种基于改进U-Net的高分影像公路线路提取方法. 时空信息学报, 30(3): 335-344[Lian H J, Wang W G, Zhu J, Tang R R, Xie Y K. 2023. A highway extraction method from high-resolution images based on improved U-Net. Journal of Spatio-temporal Information, 30(3): 335-344 (in Chinese)]吕书强, 王诗涵, 侯妙乐, 谷明岩, 汪万福. 2022. 基于改进U-Net的壁画颜料层脱落病害区域提取. 地理信息世界, 29(1): 69-74 [Lyu S Q, Wang S H, Hou M L, Gu M Y, Wang W F. 2022. Extraction of mural paint loss diseases based on improved U-net. Geomatics World, 29(1): 69-74 (in Chinese)]王青宁. 2022. 基于图像处理的路面病害检测方法研究. 硕士学位论文. 南京:南京信息工程大学[Wang Q N. 2022. Research on pavement disease detection method based on image processing. Master Dissertation. Nanjing: Nanjing University of Information Science & Technology(in Chinese)]王诗洋, 李淳, 于兴超. 2021. 基于深度学习的遥感影像目标自动提取技术研究. 地理信息世界, 28(2): 120-124[Wang S Y, Li C, Yu X C. 2021. Automatic extraction of target information for remote sensing images using deep learning methods. Geomatics World, 28(2): 120-124 (in Chinese)]胥铁峰, 黄河, 张红民, 牛晓富. 2024. 基于改进YOLOv8的轻量化道路病害检测方法. 计算机工程与应用, 60(14): 175-186[Xu T F, Huang H, Zhang H M, Niu X F. 2024. Lightweight road damage detection method based on improved YOLOv8. Computer Engineering and Applications, 60(14): 175-186 (in Chinese)]杨琴, 安见才让. 2024. 基于YOLOv6的青藏高原畜种图像的识别研究. 信息化研究, 50(1): 38-44[Yang Q, Anjian C R. 2024. Research on the recognition of livestock images in the Qinghai-Tibet Plateau based on YOLOv6. Informatization Research, 50(1): 38-44 (in Chinese) ]喻露, 戴甜杰, 余丽华. 2023. 基于改进YOLOv5的道路病害智能检测. 福建工程学院学报, 21(4): 332-337[Yu L, Dai T J, Yu L H. 2023. Automatic detection of pavement defect based on improved YOLOv5 algorithm. Journal of Fujian University of Technology, 21(4): 332-337 (in Chinese)]钟山, 蒋盛川, 杜豫川, 刘成龙, 吴荻非. 2023. 考虑低光照场景的自适应路面病害检测模型. 中国公路学报, 36(12): 289-303 [Zhong S, Jiang S C, Du Y C, Liu C L, Wu D F. 2023. An adaptive pavement defect-detection model considering low-light scenarios. China Journal of Highway and Transport, 36(12): 289-303 (in Chinese)]朱小凡, 胡璐锦, 王恺, 王坚. 2024. 基于SE-Mask-RCNN建筑遗产识别与空间可视化分析. 时空信息学报, 31(1): 50-56[Zhu X F, Hu L J, Wang K, Wang J. 2024. Architectural heritage recognition and spatial visualization analysis based on SE-Mask-RCNN. Journal of Spatio-temporal Information, 31(1): 50-56 (in Chinese)]Arya D, Maeda H, Ghosh S K, Toshniwal D, Sekimoto Y. 2024. RDD2022: A multi-national image dataset for automatic road damage detection. Geoscience Data Journal, 11(4): 846-862Chen P Y, Chang M C, Hsieh J W, Chen Y S. 2021. Parallel residual bi-fusion feature pyramid network for accurate single-shot object detection. IEEE Transactions on Image Processing, 30: 9099-9111He X Y, Tang Z W, Deng Y B, Zhou G X, Wang Y F, Li L J. 2023. UAV-based road crack object-detection algorithm. Automation in Construction, 154: 105014Lau K W, Po L M, Rehman Y A U. 2024. Large separable kernel attention: Rethinking the large kernel attention design in CNN. Expert Systems with Applications, 236: 121352Li C Y, Li L L, Jiang H L, Weng K H, Geng Y F, Li L, Ke Z D, Li Q Y, Cheng M, Nie W Q, Li Y D, Zhang B, Liang Y F, Zhou L Y, Xiu X M, Chu X X, Wei X M, Wei X L. 2022. YOLOv6: A single-stage object detection framework for industrial applications // Computer Vision and Pattern Recognition. New Orleans, LA, USALi Y X, Sun S Y, Song W D, Zhang J H, Teng Q S. 2024. CrackYOLO: Rural pavement distress detection model with complex scenarios. Electronics, 13(2): 312Qin T, Zheng Y X, Chen T Q, Chen Y L, Su Q. 2021. A light-weight semantic map for visual localization towards autonomous driving// 2021 IEEE International Conference on Robotics and Automation (ICRA). Xi’an, China. 11248-11254Ren M, Zhang X F, Zhi X B, Wei Y J, Feng Z Y. 2024. An annotated street view image dataset for automated road damage detection. Scientific Data, 11(1): 407Varghese R, Sambath M. 2024. YOLOv8: A novel object detection algorithm with enhanced performance and robustness//2024 International Conference on Advances in Data Engineering and Intelligent Computing Systems (ADICS). Chennai, India. 1-6Zhang J H, Sun S Y, Song W D, Li Y X, Teng Q S. 2024. Automated pavement distress detection based on convolutional neural network. IEEE Access, 12: 105055-105068
点我访问原文链接
